通信部分介绍
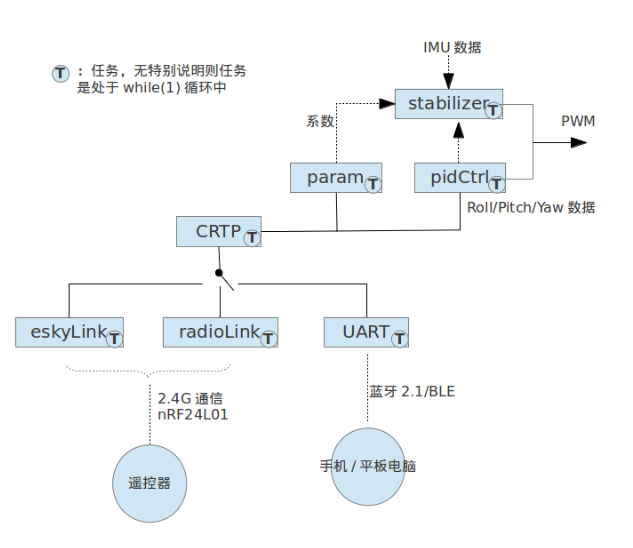
通信协议指的是遥控端和主控之间交互数据的封装,是一种自行约定的数据封装格式。我们采用的是Crazyflie项目中定义的CRTP协议。
遥控端和主控之间数据的交互,物理层可以有下面几种方式:
- 单片2.4G无线射频收发芯片,通过SPI接口和MCU连接
- 蓝牙2.1透传模块,通过串口UART和MCU连接
- 蓝牙4.0低功耗BLE透传模块,通过串口UART和MCU连接
这几种不同的物理层通信方式在同一时刻只能够选择其中的一种。并且蓝牙2.1和蓝牙BLE根据安装的透传模块不一样进行选择。
ESky Protocol
在上面示意图的的通信方式选择上,最左边为EskyLink,对应使用宏USE_ESKYLINK来开启是否选择该种链接方式。
# Make copter firmware to be used with the bootloader, CF controlled with eSky ET6i transmitter
$ make clean && make USE_ESKYLINK=1 CLOAD=1 all
所谓的Esky Protocol,其实就是ESky公司遥控器使用的通信协议。所以如果选用这种通信方式,那么可以使用ESky航模公司的遥控器进行控制。Crazyflie官网支持ESKY ET6I Remote Control遥控器。
关于ESky公司的2.4G遥控器设备的通信协议,参考ArduinoRCLib项目中的描述:
The Esky 2.4 GHz equipment uses the Nordic NRF2401AG in both the transmitter and receiver. A compatible alternative to this chip is the NRF24L01+ (which is widely available).
ESky相关协议内容暂时不研究。
串口
使用串口作为物理层指的是蓝牙透传模块(包括蓝牙2.1或者蓝牙4.0 BLE模块)。串口配置为115200 8N1,收发异步。
一个可供主控解析的数据包格式,约定如下:
7 6 5 4 3 2 1 0
| Port | Res. | Chan. |
| DATA 0 |
: : : : : : : : :
| DATA 31 |
开始为一个字节的头,该字节中包括port字段,reserve字段,channel字段。紧跟着该自己,就是0-31个字节的数据,数据的长度是任意的。
头字节中的port字段用来区分该数据包的功能,常见的包括下面几个
- 0x0 : console
- 0x2 : parameter,表示后面的数据是系统的参数
- 0x3 : commander,操作命令,控制飞机的飞行,包括pitch/yaw/roll等
- ……
对于串口传输,在上面数据包的最前面需要加上两个字节0xaaaa的起始数据,在最后加上一个字节的checksum数据。格式如下:
7 6 5 4 3 2 1 0
| 0xAA |
| 0xAA |
| Port | Res | Chan. |
| Packet length |
| DATA 0 |
: : : : : : : : :
| DATA 30 |
| Cksum |
| 0xAA | 0xAA | Header | Length | Data0 | Packet | Cksum |
注意,紧跟在头后面的第一个data字节,表示后面数据的长度。
操作命令
操作命令是指用于控制飞行器起飞,前后左右运动的命令,英文commander。操控命令是遥控器最基本,也是最常用的命令。数据包头中port字段为0x3表示操作命令。Crazyflie操作数据格式约定如下。
| ROLL | PITCH | YAW |THRUST |
0 4 8 12 14 bytes
操作数据一共14个字节,前12个字节分别表示Roll,Pitch,Yaw的值,每个值使用4个字节。后2个字节表示Thrust的值,使用2个字节。
所以,使用串口发送的一个操作命令示例如下:
0xaa 0xaa 0x30 0x0e 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x3e