四元数与四轴飞行器
四元数
四元数是由爱尔兰数学家威廉·卢云·哈密顿在1843年发现的数学概念。从明确地角度而言,四元数是复数的不可交换延伸。如把四元数的集合考虑成多维实数空间的话,四元数就代表着一个四维空间,相对于复数为二维空间。
四元数大量用于电脑绘图(及相关的图像分析)上表示三维物件的旋转及方位。四元数亦见于控制论、信号处理、姿态控制、物理和轨道力学,都是用来表示旋转和方位。
相对于另几种旋转表示法(矩阵,欧拉角,轴角),四元数具有某些方面的优势,如速度更快、提供平滑插值、有效避免万向锁问题、存储空间较小等等。
以上部分摘自维基百科-四元数。
姿态解算为什么要用四元数
姿态解算的核心在于旋转,一般旋转有4种表示方式:矩阵表示、欧拉角表示、轴角表示和四元数表示。矩阵表示适合变换向量,欧拉角最直观,轴角表示则适合几何推导,而在组合旋转方面,四元数表示最佳。因为姿态解算需要频繁组合旋转和用旋转变换向量,所以采用四元数保存组合姿态、辅以矩阵来变换向量的方案。
总结来说,在crazepony中,姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。
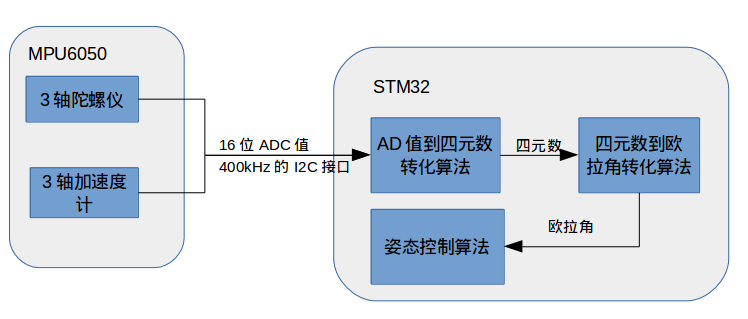
姿态控制算法的输入参数必须要是欧拉角。AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。AD值必须先转化为四元数,然后通过四元数转化为欧拉角。这个四元数可能是软解,主控芯片(STM32)读取到AD值,用软件从AD值算得,也可能是通过MPU6050中的DMP硬解,主控芯片(STM32)直接读取到四元数。具体参考《MPU60x0的四元数生成方式介绍》。
下面就是四元数软解过程,可以由下面这个框图表示:
四元数的运算
下面介绍一下四元数,然后给出几种旋转表示的转换。这些运算在crazepony的代码中都会遇到。
四元数可以理解为一个实数和一个向量的组合,也可以理解为四维的向量。这里用一个圈表示q是一个四元数(很可能不是规范的表示方式)。

四元数的长度(模)与普通向量相似。

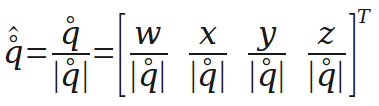
下面是对四元数的单位化,单位化的四元数可以表示一个旋转。
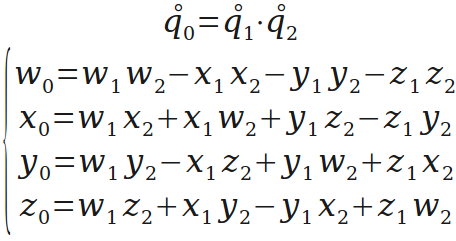
四元数相乘,旋转的组合就靠它了。
旋转的“轴角表示”转“四元数表示”。这里创造一个运算q(w,θ),用于把绕单位向量w转θ角的旋转表示为四元数。

通过q(w,θ),引伸出一个更方便的运算q(f,t)。有时需要把向量f的方向转到向量t的方向,这个运算就是生成表示对应旋转的四元数的(后面会用到)。

然后是“四元数表示”转“矩阵表示”。再次创造运算,用R(q)表示四元数q对应的矩阵(后面用到)。

多个旋转的组合可以用四元数的乘法来实现。

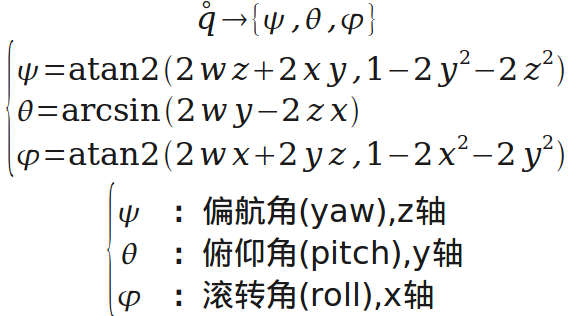
“四元数表示”转“欧拉角表示”。用于显示。