硬件姿态解算
四轴的姿态解算无疑是最繁琐的步骤没有之一,但是自从MPU6050出现了硬件DMP的时候,大妈都能完成姿态解算了!
CrazePony使用了MPU6050自带的硬件四元数单元,可以通过IIC直接读取四元数,省却了软件解算繁琐的算法步骤,非常方便易用。
这里还是要首先介绍下四元数,四元数要说的实在太多,因为它的优点很多,利用起来很方便,但是理解起来就有点蹩脚了。我们百度四元数,一开始看到的就是四元数来历,还有就是四元数的基本计算。对于来历,还是想说一下,四元数(Quaternions)是由威廉·卢云·哈密尔顿(William RowanHamilton,1805-1865)在1843 年爱尔兰发现的数学概念。
将实数域扩充到复数域,并用复数来表示平面向量,用复数的加、乘运算表示平面向量的合成、伸缩和旋,这就是我们熟知的复数的二维空间含义,所以人们会继续猜想,利用三维复数不就可以表达三维空间的变换了吗,历史上有很多数学家试图寻找过三维的复数,但后来证明这样的三维复数是不存在的。有关这个结论的证明,我没有查到更明确的版本,据《古今数学思想》中的一个理由,三维空间中的伸缩旋转变换需要四个变量来决定:两个变量决定轴的方向,一个变量决定旋转角度,一个变量决定伸缩比例。这样,只有三个变量的三维复数无法满足这样的要求。但是历史上得到的应该是比这个更强的结论,即使不考虑空间旋转,只从代数角度来说,三维的复数域作为普通复数域的扩张域是不存在的。并且,据《古今数学思想》叙述,即使像哈密尔顿后来引入四元数那样,牺牲乘法交换律,这样的三维复数也得不到。经过一些年的努力之后, Hamilton 发现自己被迫应作两个让步,第一个是他的新数包含四个分量,而第二个是他必须牺牲乘法交换律。( 《古今数学思想》第三册177 页)但是四元数用作旋转的作用明显,简化了运算,而且避免了Gimbal Lock,四元数是最简单的超复数,我们不能把四元数简单的理解为3D 空间的矢量,它是4 维空间中的的矢量,也是非常不容易想像的。
我们知道在平面(x,y)中的旋转可以用复数来表示,同样的三维中的旋转可以用单位四元数来描述。我们来定义一个四元数:

我们可以把它写成 ,其中
,其中 ,
, 。那么V是矢量,表示三维空间中的旋转轴。w是标量,表示旋转角度。那么就是绕轴V旋转w度,所以一个四元数可以表示一个完整的旋转。只有单位四元数才可以表示旋转,至于为什么,因为这就是四元数表示旋转的约束条件。
。那么V是矢量,表示三维空间中的旋转轴。w是标量,表示旋转角度。那么就是绕轴V旋转w度,所以一个四元数可以表示一个完整的旋转。只有单位四元数才可以表示旋转,至于为什么,因为这就是四元数表示旋转的约束条件。
所以大家可以理解为,单位四元数能够表示旋转。我们给出一组单位四元数和欧拉角的转换关系,通过这个关系来将采集到的四元数转化成欧拉角,原理将在软件解算中给出,这里直接使用就可以了:
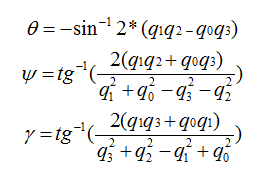
所以在四轴飞行器中,传感器读取到四元数,首先应先将它归一化成单位四元数:
norm = dmpinvSqrt(q[0]*q[0] + q[1]*q[1] + q[2]*q[2] + q[3]*q[3]);
q[0] = q[0] * norm;
q[1] = q[1] * norm;
q[2] = q[2] * norm;
q[3] = q[3] * norm;
归一化后根据四元数和欧拉角转换公式把四元数转化为欧拉角,OK,硬件姿态解算完成!
DMP_DATA.dmp_roll = (atan2(2.0*(q[0]*q[1] + q[2]*q[3]), 1 - 2.0*(q[1]*q[1] + q[2]*q[2])))* 180/M_PI;
// we let safe_asin() handle the singularities near 90/-90 in pitch
DMP_DATA.dmp_pitch = dmpsafe_asin(2.0*(q[0]*q[2] - q[3]*q[1]))* 180/M_PI;
DMP_DATA.dmp_yaw = -atan2(2.0*(q[0]*q[3] + q[1]*q[2]), 1 - 2.0*(q[2]*q[2] + q[3]*q[3]))* 180/M_PI;